| Version 5 (modified by shetrone, 8 years ago) (diff) |
|---|
Setup of the Probes
There are 4 probes:
- Guide probe 1 (GC1)
- Guide probe 2 (GC2)
- Wave Front Sensor 1 (WFS1)
- Wave Front Sensor 2 (WFS2)
Home of the guider probes
The guider probes are on absolute encoders so the purpose of the home is simply to move the probes 90 degrees from each other. In the near future we will likely change the end position of the home to be mid range on axis.
Command: syscmd -v -P 'HomeProbes()'
Move of the guide probes in their X and Y coordinate system
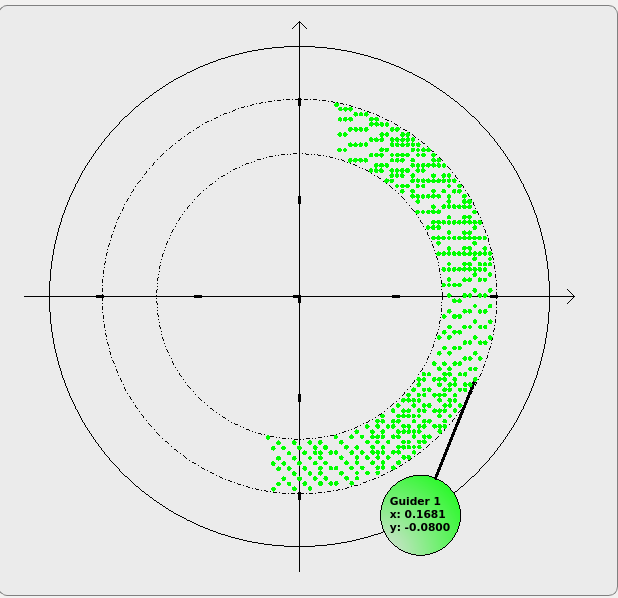
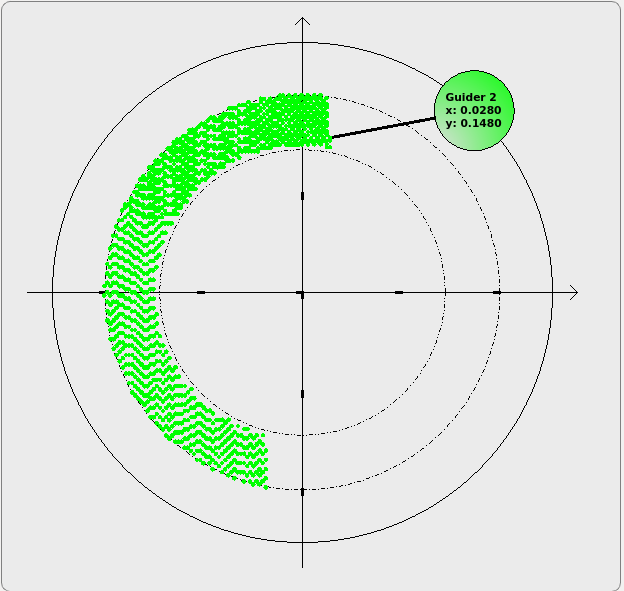
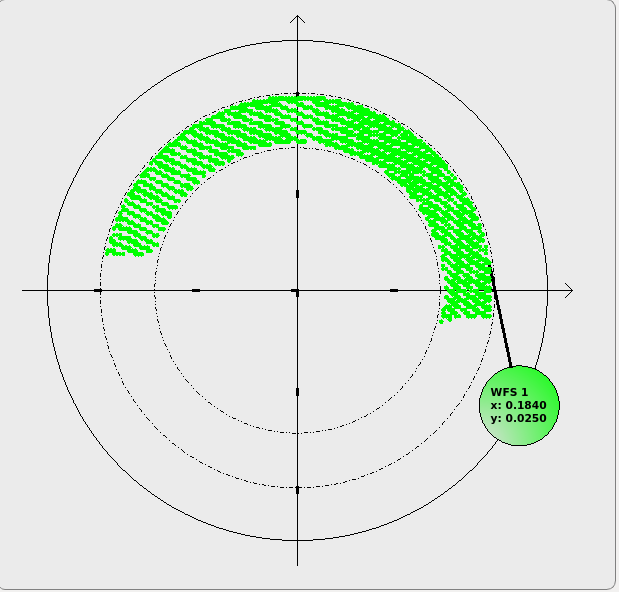
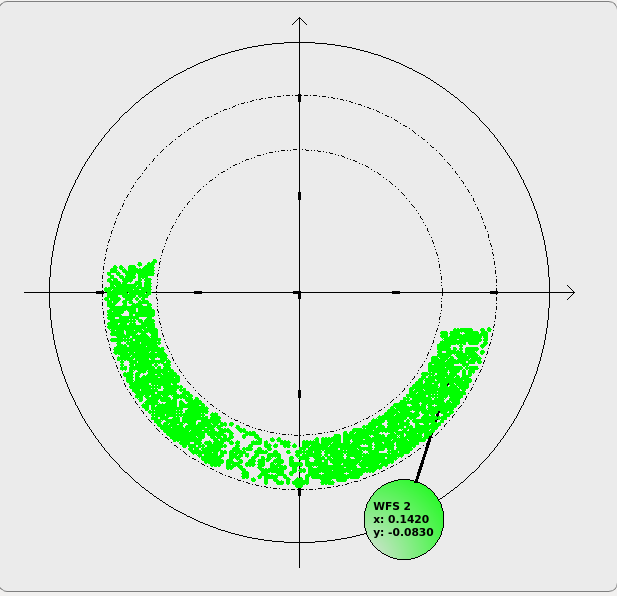
The probes actually move along a annulus and have a swing arm moving from that position. This results in 180 degrees of motion (overlapping for each probe). While one could reference these angles of motion (in degrees) we usually fall back on a X and Y coordinate transform which are nearly aligned with the tracker X and Y coordinate system.
One can move the probes in this X and Y coordinate system:
Command: syscmd -v -P 'Guider1_set_position( x_ang=0.16, y_ang=0.00) '
Examples: syscmd -T -v 'Guider1_set_position( x_ang=0.16, y_ang=0.00) '
syscmd -T -v 'Guider2_set_position( x_ang=-0.16, y_ang=0.00) '
syscmd -T -v 'WFS1_set_position( x_ang=0.00, y_ang=0.16) '
syscmd -T -v 'WFS2_set_position( x_ang=0.00, y_ang=-0.16) '
Attachments (4)
-
G1Range.png
(20.4 KB) -
added by shetrone 8 years ago.
Range of motion for the GC1 probe
-
G2Range.png
(22.2 KB) -
added by shetrone 8 years ago.
Range of motion for the GC2 probe
-
WFS1Range.png
(20.0 KB) -
added by shetrone 8 years ago.
Range of motion for the WFS 1
-
WFS2Range.png
(19.5 KB) -
added by shetrone 8 years ago.
Range of motion for the WFS 2
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip